|
Hi! I am a second-year PhD student at Cornell University, where I am advised by Prof. Tapomayukh Bhattacharjee in the EmPRISE Lab. My research focuses on using robots to dress people with mobility limitations, with everyday clothing. I am interested in haptic perception, deformable object manipulation, and safe human-robot interaction. Previously, I graduated from the Indian Institute of Technology, Bombay where I worked with Prof. Leena Vachhani and Prof. Hemendra Arya. At IIT Bombay, I worked on robust state estimation techniques for ground robots with access to only bearing measurements. I was also a research engineer at Honda R&D in Wako, Japan, where I worked on robust robot perception and mapping. |

|
Research

|
Pranav N. Thakkar*, Shubhangi Sinha*, Karan Baijal, Yuhan (Anjelica) Bian, Leah Lackey, Ben Dodson, Heisen Kong, Jueun Kwon, Amber Li, Yifei Hu, Alexios Rekoutis, Tom Silver, Tapomayukh Bhattacharjee Conference on Robot Learning (CoRL), 2025 We collect in-the-wild multimodal haptic data at scale to create visuo-haptic perception models that enable real-world robot manipulation. |

|
Ziang Liu, Yuanchen Ju, Yu Da, Tom Silver, Pranav N. Thakkar, Jenna Li, Justin Guo, Katherine Dimitropoulou, Tapomayukh Bhattacharjee ACM/IEEE International Conference on Human-Robot Interaction (HRI), 2025 We introduce a method to infer a users’ functional range of motion from occupational therapy assessments, to enable personalized robot-assisted caregiving. |

|
Pranav N. Thakkar, Prashant V. Patil, Leena Vachhani American Control Conference, 2021 We discuss the structure of unobservable spaces for a family of joint state & parameter localization problems, for a ground robot with access to only bearing measurements. |
|
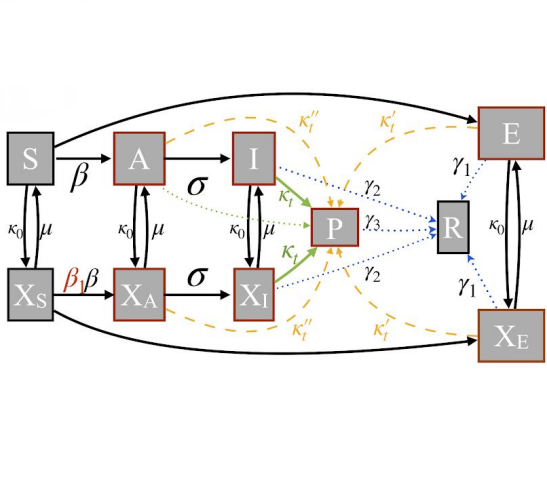
Heterogeneity Sanit Gupta, Sahil Shah, Sumit Chaturvedi, Pranav Thakkar, Parvinder Solanki, Soham Dibyachintan, Sandeepan Roy, M. B. Sushma, Adwait Godbole, Noufal Jaseem, Pradumn Kumar, Sucheta Ravikanti, Aritra Das, Giridhara R. Babu, Tarun Bhatnagar, Avijit Maji, Mithun K. Mitra, Sai Vinjanampathy arXiv, 2020 We develop an India-specific compartmental model that incorporates regional healthcare capacity and mobility to project COVID-19 spread and assess intervention strategies. |

|
Prashant V. Patil*, Pranav Thakkar*, Leena Vachhani arXiv, 2019 We show that a class of tunable nonlinear Kalman filters work well towards robust state estimation without having to re-estimate landmark locations. *equal contribution |
|
Pranav Thakkar, Leena Vachhani Advances in Robotics, 2019 A comparative analysis of heuristics-based algorithms that select a subset of landmarks for robot navigation with access to only bearing measurements. |
Thesis
|
Pranav Thakkar, Master's Thesis, 2022 A compilation of my work over two years at the ARMS Lab, ranging from observability analysis to robust state estimation for ground robots with only bearing measurements. |
|
Website template borrowed from Jon Barron. |